Admin
13 ส.ค. 2562
นักวิจัยจีนกำลังพัฒนา"หุ่นยนต์ปลากระเบนปีศาจ"
คณะนักวิจัยจีนที่มหาวิทยาลัยโปลีเทคนิคภาคตะวันตกเฉียงเหนือ ในเมืองซีอาน มณฑลส่านซี ของจีน กำลังพัฒนาหุ่นยนต์อ่อนนุ่มต้นแบบ ซึ่งจำลองจากรูปร่างและความเคลื่อนไหวอันพิเศษโดดเด่นของปลากระเบนแมนตา หรือที่เรียกกันว่า ปลากระเบนปีศาจ ขณะที่ทีมนักวิจัยของมหาวิทยาลัยคอร์แนล สหรัฐฯ ก็พัฒนาหุ่นยนต์อ่อนนุ่มต้นแบบซึ่งเลียนแบบ “ปลาสิงโต”

หุ่นยนต์ปลากระเบนแพนตาต้นแบบ ของคณะนักวิจัยแห่งมหาวิทยาลัยโปลีเทคนิคภาคตะวันตกเฉียงเหนือ ในประเทศจีน ซึ่งช่วงปลายปีกด้านหนึ่งไปยังอีกด้านหนึ่งยาว 80 เซนติเมตร ใช้พลังงานจากแบตเตอรีลิเธียม และสามารถว่ายน้ำด้วยความเร็วสูงสุดที่ 1.85 กิโลเมตรต่อชั่วโมง
คณะนักวิจัยจีนในมหาวิทยาลัยโปลีเทคนิคภาคตะวันตกเฉียงเหนือ (Northwestern Polytechnical University) ซึ่งตั้งอยู่ที่เมืองซีอาน มณฑลส่านซี เพิ่งพัฒนาหุ่นยนต์เลียนแบบชีวิตตามธรรมชาติ (biomimetic robot) ที่อยู่ในรูปร่างของ ปลากระเบนแมนตา หรือ ปลากระเบนราหู (manta ray ในภาษาอังกฤษ บางทีเรียกกันว่า devilfish ปลากระเบนปีศาจ) โดยมันสามารถขยับปีกทั้งสองข้าง และไถลตัวเมื่ออยู่ใต้น้ำ ทั้งนี้ตามรายงานของ ไชน่าเดลี่ (China Daily) หนังสือพิมพ์ภาษาอังกฤษของทางการจีน ปลากระเบนแมนตา ซึ่งถือเป็นสัตว์นักว่ายน้ำได้อย่างทรงประสิทธิภาพที่สุดประเภทหนึ่งในธรรมชาติ มีกลไกการขับดันตัวที่พิเศษโดดเด่น เพียบพร้อมด้วยคุณสมบัติอย่างเช่น การขับดันตัวอย่างมีประสิทธิภาพสูง, ความสามารถที่สูงในการเคลื่อนไหวและในการทรงตัว, การก่อให้เกิดเสียงแค่เพียงระดับต่ำ, และการมีศักยภาพในการบรรทุกได้มาก
นักวิจัยคณะนี้ได้สร้างหุ่นยนต์ลำตัวนิ่มชีวประดิษฐ์ (bionic soft robot) ต้นแบบ (prototype) ซึ่งจำลองรูปร่างและการเคลื่อนไหวของปลากระเบนแมนตาขึ้นมา รายงานข่าวชิ้นนี้ระบุ หุ่นยนต์ต้นแบบตัวนี้ ซึ่งจากปลายปีกหนึ่งถึงอีกปลายหนึ่งมีความยาว 80 เซนติเมตร ได้พลังงานจากแบตเตอรีลิเธียม และสามารถว่ายน้ำได้ด้วยความเร็วสูงสุดที่ 1.85 กิโลเมตรต่อชั่วโมง
“ทีมของเรายังกำลังพัฒนาหุ่นยนต์ต้นแบบตัวอื่นๆ ซึ่งสามารถดำน้ำไปลึกถึง 1,000 เมตร และทำงานอย่างต่อเนื่องได้เป็นเวลา 1 เดือน” พาน กวง (Pan Guang) หัวหน้าโครงการซึ่งเป็นคณบดีของคณะวิทยาศาสตร์และเทคโนโลยีทางทะเลของมหาวิทยาลัยแห่งนี้ด้วย กล่าว เขาบอกอีกว่า เมื่อสร้างเสร็จสมบูรณ์แล้ว หุ่นยนต์แบบนี้สามารถใช้สำหรับดำเนินปฏิบัติการค้นหาใต้น้ำ, สังเกตการณ์สภาพแวดล้อมมหาสมุทร, และดำเนินการสืบสวนตรวจสอบทางวิทยาศาสตร์ใต้ทะเล ทางทีมงานมีกำหนดจะนำหุ่นยนต์นี้ไปทดสอบในสภาพแวดล้อมของทะเลสาบเร็วๆ นี้ และในมหาสมุทรเปิดในปีหน้า พวกเขายังมีแผนการติดตั้งตัวเซนเซอร์สำหรับการตรวจจับภาพและเสียงที่หุ่นยนต์เพิ่มมากขึ้น เพื่อการวิจัยต่อไปในอนาคต หุ่นยนต์ลำตัวนิ่มนั้น โดยพื้นฐานแล้วทำจากวัสดุที่สามารถปั้นแต่งเป็นรูปร่างต่างๆ ได้ง่าย ซึ่งพอจะเปรียบเทียบอย่างหยาบๆ ได้ว่ามีคุณภาพทางด้านความยืดหดตัวได้แบบเนื้อเยื่อของสิ่งมีชีวิตเหมือนกับปลาหมึกที่กำลังบีบรีดตัวเองให้เคลื่อนผ่านช่องเปิดแคบๆ หุ่นยนต์ลำตัวนิ่มต้องสามารถดัดแปลงรูปร่างของตัวเองและใช้วิธีการเคลื่อนไหวต่างๆ ให้เหมาะสมสำหรับภารกิจและเงื่อนไขสภาพแวดล้อมที่ผิดแผกแตกต่างกันหลายหลาก เหมือนกันอยู่เยอะทีเดียวกับวิธีการที่พวกสิ่งมีชีวิตจำนวนมากเคลื่อนไหวและปรับตัวให้เข้ากับสภาพแวดล้อมของพวกมัน
การปรากฏตัวขึ้นมาของเครื่องยนต์กลไกที่ยืดหดตัวได้อย่างอ่อนนุ่ม, ปรับตัวง่ายทำให้ทำงานได้อเนกประสงค์, และได้รับแรงบันดาลใจจากสิ่งมีชีวิตเช่นนี้ กำลังเปิดเผยให้เห็นพื้นที่แวดวงในวิชาการทางวิศวกรรมศาสตร์ซึ่งทั้งน่าตื่นตาตื่นใจและต้องนำเอาความรู้ด้านต่างๆ มาผนวกรวมตัวกันแบบสหวิทยาการอย่างสูง และเป็นสิ่งที่อาจปฏิวัติเปลี่ยนแปลงบทบาทของวิทยาการหุ่นยนต์อย่างมากมายมหาศาล
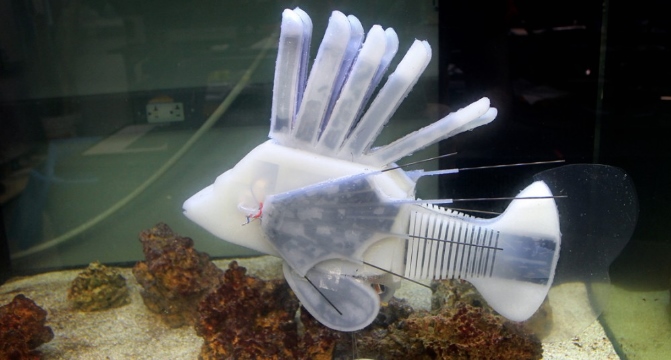
หุ่นยนต์ปลาสิงโตของคณะนักวิจัยที่ห้องแล็ปหุ่นยนต์อินทรีย์ มหาวิทยาลัยคอร์แนล (Cornell University) รัฐนิวยอร๋ก สหรัฐอเมริกา ใช้พลังงานจากเลือดไฮโดรลิก และเครื่องปั๊มหัวใจ 2 เครื่อง
ในอีกด้านหนึ่ง คณะนักวิจัยที่ห้องแล็ปหุ่นยนต์อินทรีย์ (organic robots) ของมหาวิทยาลัยคอร์แนล, สหรัฐอเมริกา ก็เพิ่งสร้างหุ่นยนต์ปลาสิงโต (robo-lionfish) ขึ้นมาตัวหนึ่ง ซึ่งใช้พลังงานจากเลือดไฮโดรลิก (hydraulic blood) และเครื่องปั๊มหัวใจ (heart pump) 2 เครื่อง รายงานในวารสาร เคมิสทรีเวิร์ลด์ (Chemistry World) ระบุ จากเลือดไฮโดรลิกซึ่งทำหน้าที่เป็นสารละลายที่เป็นตัวนำไฟฟ้า (electrolyte), เครื่องปั๊ม 2 เครื่องที่มีการบีบตัวคลายตัวแบบหัวใจ, ตลอดจนแบตเตอรีเหลวเสื่อมสภาพช้า (flow battery) จำนวนมากซึ่งอยู่ตรงช่องท้อง, (คล้ายๆ กับปลาสิงโตตัวจริงเป็นอย่างมาก) หุ่นยนต์ปลาตัวนี้ก็สามารถว่ายน้ำได้ ด้วยการเคลื่อนหางของมันไปมา รวมทั้งสามารถกระพือครีบอก (pectoral fins) ของมันได้ด้วย (ถึงแม้ว่ายังเป็นโชคดีที่มันไม่ได้มีพิษร้ายแบบเดียวกับปลาสิงโตมีชีวิตตัวจริง) ลำตัวทำด้วยซิลิโคนนุ่มของหุ่นยนต์ตัวนี้ถูกปั้นแต่งให้มีรูปร่างแบบปลาสิงโต ครีบของมันบรรจุไว้ด้วยแบตเตอรีเหลวซิงค์ไอโอไดด์ (zinc iodide flow batteries) บางๆ และเครื่องปั๊ม 2 เครื่องจะคอยทำให้สารละลายที่เป็นตัวนำไฟฟ้า (เลือด) ไหลวนเวียนระหว่างแบตเตอรีตัวต่างๆ หางของหุ่นยนต์ปลาสิงโตนี้จะเคลื่อนที่ เมื่อของเหลวถูกปั๊มจากด้านซ้ายของครีบไปยังด้านขวาของมัน และครีบอกก็จะถูกผลักออกจากส่วนลำตัว เมื่อแอ่งเก็บของเหลวในตัวมันมีสารละลายที่เป็นตัวนำไฟฟ้าไหลเติมเข้ามา แบตเตอรีเหลวเหล่านี้ ในทางทฤษฎีแล้ว มีความสามารถในการเก็บพลังงาน (energy density) ได้เท่ากับครึ่งหนึ่งของแบตเตอรีลิเธียมไอออน (lithium ion batteries) ของรถยนต์ เทสลา เอส (Tesla S) นั่นคือเพียงพอสำหรับให้หุ่นยนต์ปลาตัวนี้ว่ายน้ำไปเกือบๆ 37 ชั่วโมงก่อนที่จะต้องชาร์จแบตเตอรีเติมพลังกันใหม่
ที่มา:MGR ONLINE